ResNet
原文地址: https://arxiv.org/pdf/1512.03385v1
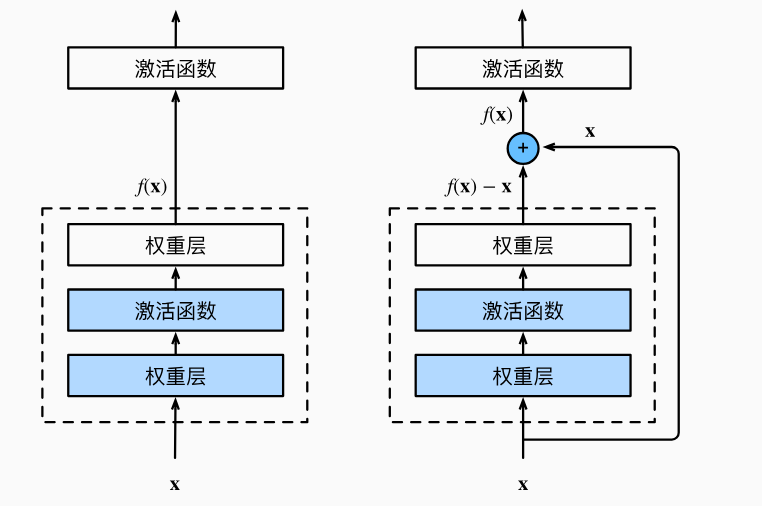
残差块
残差网络的核心思想是:每个附加层都应该更容易地包含原始函数作为其元素之一。如下图,残差块就是把原始的输入x 和经过拟合完的输出做加权运算,从而得到一个新的恒等映射f(x), 当经过权重层输出的函数不理想或者误差较大,残差块还可以保留原始输出而不至于累积误差。
ResNet沿用了VGG完整的3x3卷积层设计。 残差块里首先有2个有相同输出通道数的3x3卷积层。 每个卷积层后接一个批量规范化层和ReLU激活函数。 然后我们通过跨层数据通路,跳过这2个卷积运算,将输入直接加在最后的ReLU激活函数前。 这样的设计要求2个卷积层的输出与输入形状一样,从而使它们可以相加。 如果想改变通道数,就需要引入一个额外的1x1卷积层来将输入变换成需要的形状后再做相加运算。 残差块的实现如下:
import torch
from torch import nn
from torch.nn import functional as F
class Residual(nn.Module):
def __init__(self, input_channels, num_channels,
use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
此代码生成两种类型的网络: 一种是当use_1x1conv=False时,应用ReLU非线性函数之前,将输入添加到输出。 另一种是当use_1x1conv=True时,添加通过1x1卷积调整通道和分辨率。
ResNet 模型
ResNet的前两层跟之前介绍的GoogLeNet中的一样: 在输出通道数为64、步幅为2的7x7卷积层后,接步幅为2的3x3的最大汇聚层。 不同之处在于ResNet每个卷积层后增加了批量规范化层。
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
GoogLeNet在后面接了4个由Inception块组成的模块。 ResNet则使用4个由残差块组成的模块,每个模块使用若干个同样输出通道数的残差块。 第一个模块的通道数同输入通道数一致。 由于之前已经使用了步幅为2的最大汇聚层,所以无须减小高和宽。 之后的每个模块在第一个残差块里将上一个模块的通道数翻倍,并将高和宽减半。
下面我们来实现这个模块。注意,我们对第一个模块做了特别处理。
def resnet_block(input_channels, num_channels, num_residuals,
first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels,
use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
接着在ResNet加入所有残差块,这里每个模块使用2个残差块。
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True))
b3 = nn.Sequential(*resnet_block(64, 128, 2))
b4 = nn.Sequential(*resnet_block(128, 256, 2))
b5 = nn.Sequential(*resnet_block(256, 512, 2))
最后,与GoogLeNet一样,在ResNet中加入全局平均汇聚层,以及全连接层输出。
net = nn.Sequential(b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(), nn.Linear(512, 10))
每个模块有4个卷积层(不包括恒等映射的1x1卷积层)。 加上第一个7x7卷积层和最后一个全连接层,共有18层。 因此,这种模型通常被称为ResNet-18。 通过配置不同的通道数和模块里的残差块数可以得到不同的ResNet模型,例如更深的含152层的ResNet-152。 虽然ResNet的主体架构跟GoogLeNet类似,但ResNet架构更简单,修改也更方便。这些因素都导致了ResNet迅速被广泛使用。
训练模型
import torch
from torch import nn
from torchvision import datasets, transforms
from torch.nn import functional as F
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
from matplotlib_inline import backend_inline
from IPython import display
import time
def load_data_fashion_mnist(batch_size, resize=None):
"""Download the Fashion-MNIST dataset and then load it into memory.
Defined in :numref:`sec_utils`"""
trans = [transforms.ToTensor()]
if resize:
trans.insert(0, transforms.Resize(resize))
trans = transforms.Compose(trans)
mnist_train = datasets.FashionMNIST(
root="../data", train=True, transform=trans, download=True)
mnist_test = datasets.FashionMNIST(
root="../data", train=False, transform=trans, download=True)
return (torch.utils.data.DataLoader(mnist_train, batch_size, shuffle=True,
num_workers=4),
torch.utils.data.DataLoader(mnist_test, batch_size, shuffle=False,
num_workers=4))
class Accumulator:
"""For accumulating sums over `n` variables."""
def __init__(self, n):
"""Defined in :numref:`sec_utils`"""
self.data = [0.0] * n
def add(self, *args):
self.data = [a + float(b) for a, b in zip(self.data, args)]
def reset(self):
self.data = [0.0] * len(self.data)
def __getitem__(self, idx):
return self.data[idx]
def accuracy(y_hat, y):
"""返回预测正确的样本个数(float 类型)"""
# 如果 y_hat 是 logits 或概率(如 [N, C]),取预测类别
if len(y_hat.shape) > 1 and y_hat.shape[1] > 1:
y_hat = torch.argmax(y_hat, dim=1)
# 比较预测 vs 真实标签,并确保类型一致(避免 int64 vs int32 问题)
cmp = (y_hat.to(y.dtype) == y)
# 求 cmp 中 True 的个数(True=1, False=0)
return float(cmp.sum()) # cmp.sum() 等价于 torch.sum(cmp)
def evaluate_accuracy_gpu(net, data_iter, device=None):
if isinstance(net, nn.Module):
net.eval()
if not device:
device = next(iter(net.parameters())).device
metric = Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
class Animator:
def __init__(self, xlabel = None, ylabel = None, legend = None,
xlim = None, ylim = None, xscale = 'linear', yscale = 'linear',
fmts = ('-', 'm--', 'g-.', 'r:'), nrows = 1, ncols = 1,
figsize = (3.5, 2.5)):
if legend is None:
legend = []
backend_inline.set_matplotlib_formats('svg')
self.fig, self.axes = plt.subplots(nrows, ncols, figsize=figsize)
if nrows * ncols == 1:
self.axes = [self.axes, ]
self.config_axes = lambda: self.set_axes(self.axes[0], xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
self.X, self.Y, self.fmts = None, None, fmts
def set_axes(self, axes, xlabel, ylabel, xlim, ylim, xscale, yscale, legend):
axes.set_xlabel(xlabel)
axes.set_ylabel(ylabel)
axes.set_xlim(xlim)
axes.set_ylim(ylim)
axes.set_xscale(xscale)
axes.set_yscale(yscale)
if legend:
axes.legend(legend)
axes.grid()
def add(self, x, y):
if not hasattr(y, '__len__'):
y = [y]
n = len(y)
if not hasattr(x, '__len__'):
x = [x] * n
if not self.X:
self.X = [[] for _ in range(n)]
if not self.Y:
self.Y = [[] for _ in range(n)]
for i, (a, b) in enumerate(zip(x, y)):
if a is not None and b is not None:
self.X[i].append(a)
self.Y[i].append(b)
self.axes[0].cla()
for x, y, fmt in zip(self.X, self.Y, self.fmts):
self.axes[0].plot(x, y , fmt)
self.config_axes()
display.display(self.fig)
display.clear_output(wait=True)
## 模型
class Residual(nn.Module):
def __init__(self, input_channels, num_channels,
use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
def resnet_block(input_channels, num_channels, num_residuals, first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels,
use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True))
b3 = nn.Sequential(*resnet_block(64, 128, 2))
b4 = nn.Sequential(*resnet_block(128, 256, 2))
b5 = nn.Sequential(*resnet_block(256, 512, 2))
net = nn.Sequential(b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(), nn.Linear(512, 10))
def train(net, train_iter, test_iter, num_epochs, lr, device):
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print('training on', device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
animator = Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timers = []
num_batches = len(train_iter)
for epoch in range(num_epochs):
metric = Accumulator(3)
net.train()
for i, (X, y) in enumerate(train_iter):
timer = time.time()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], accuracy(y_hat, y), X.shape[0])
timers.append(time.time() - timer)
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / sum(timers):.1f} examples/sec '
f'on {str(device)}')
lr, num_epochs, batch_size = 0.1, 10, 256
train_iter, test_iter = load_data_fashion_mnist(batch_size, resize=96)
train(net, train_iter, test_iter, num_epochs, lr, torch.device('cuda' if torch.cuda.is_available() else 'cpu'))
loss 0.021, train acc 0.994, test acc 0.920
3331.5 examples/sec on cuda