在探究泛化性之前,我们先来定义一下什么是一个“好”的预测模型? 我们期待“好”的预测模型能在未知的数据上有很好的表现: 经典泛化理论认为,为了缩小训练和测试性能之间的差距,应该以简单的模型为目标。 简单性以较小维度的形式展现, 我们在讨论线性模型的单项式函数时探讨了这一点。 此外,正如我们在前面中讨论权重衰减(正则化)时看到的那样, 参数的范数也代表了一种有用的简单性度量。
简单性的另一个角度是平滑性,即函数不应该对其输入的微小变化敏感。 例如,当我们对图像进行分类时,我们预计向像素添加一些随机噪声应该是基本无影响的。例如,当我们对图像进行分类时,我们预计向像素添加一些随机噪声应该是基本无影响的。 1995年,克里斯托弗·毕晓普证明了 具有输入噪声的训练等价于Tikhonov正则化。 这项工作用数学证实了“要求函数光滑”和“要求函数对输入的随机噪声具有适应性”之间的联系。
在2014年,斯里瓦斯塔瓦等人就如何将毕晓普的想法应用于网络的内部层提出了一个想法: 在训练过程中,他们建议在计算后续层之前向网络的每一层注入噪声。 因为当训练一个有多层的深层网络时,注入噪声只会在输入-输出映射上增强平滑性。
这个想法被称为暂退法(dropout)。 暂退法在前向传播过程中,计算每一内部层的同时注入噪声,这已经成为训练神经网络的常用技术。 这种方法之所以被称为暂退法,因为我们从表面上看是在训练过程中丢弃(drop out)一些神经元。 在整个训练过程的每一次迭代中,标准暂退法包括在计算下一层之前将当前层中的一些节点置零。
在标准暂退法正则化中,通过按保留(未丢弃)的节点的分数进行规范化来消除每一层的偏差。 换言之,每个中间活性值h以暂退概率p由随机变量$h^`$替换,如下所示:
\[h^` = \begin{cases} 0 \,\,\,\ 概率为p \\ \frac{h}{1-p} \,\ 其他情况 \end{cases}\]根据此模型的设计,其期望值保持不变,即$E[h^`] = h$.
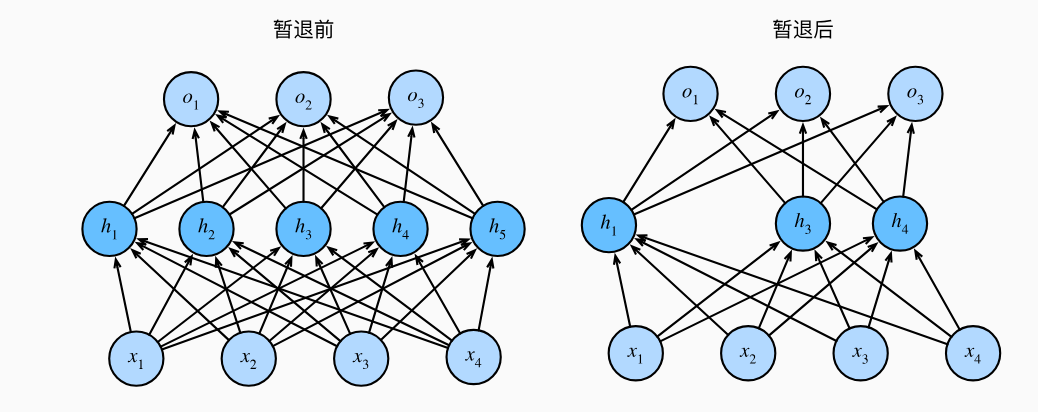
当我们将暂退法应用到隐藏层,以p的概率将隐藏单元置为零时, 结果可以看作一个只包含原始神经元子集的网络。 比如在下图中,删除了$h_2$和$h_5$, 因此输出的计算不再依赖于$h_2$或$h_5$,并且它们各自的梯度在执行反向传播时也会消失。 这样,输出层的计算不能过度依赖于$h_1,,,,,h_5$的任何一个元素。
通常,我们在测试时不用暂退法。 给定一个训练好的模型和一个新的样本,我们不会丢弃任何节点,因此不需要标准化。 然而也有一些例外:一些研究人员在测试时使用暂退法, 用于估计神经网络预测的“不确定性”: 如果通过许多不同的暂退法遮盖后得到的预测结果都是一致的,那么我们可以说网络发挥更稳定。
从零开始实现
要实现单层的暂退法函数, 我们从均匀分布中$U[0, 1]$抽取样本,样本数与这层神经网络的维度一致。 然后我们保留那些对应样本大于p的节点,把剩下的丢弃。
在下面的代码中,我们实现 dropout_layer 函数, 该函数以dropout的概率丢弃张量输入X中的元素, 如上所述重新缩放剩余部分:将剩余部分除以1.0-dropout。
import torch
from torch import nn
from d2l import torch as d2l
def dropout_layer(X, droupout):
assert 0 <= droupout <= 1
if droupout == 1:
return torch.zeros_like(X)
if droupout == 0:
return X
mask = (torch.rand(X.shape) > droupout).float()
return mask* X / (1.0 - droupout)
X = torch.arange(16, dtype=torch.float32).reshape((2, 8))
dropout_layer(X, 0)
dropout_layer(X, 0.3)
定义模型参数
我们定义具有两个隐藏层的多层感知机,每个隐藏层包含256个单元。
num_inputs, num_outputs, num_hiddens1, num_hiddens2 = 784, 10, 256, 256
定义模型
我们可以将暂退法应用于每个隐藏层的输出(在激活函数之后), 并且可以为每一层分别设置暂退概率: 常见的技巧是在靠近输入层的地方设置较低的暂退概率。 下面的模型将第一个和第二个隐藏层的暂退概率分别设置为0.2和0.5, 并且暂退法只在训练期间有效。
dropout1, dropout2 = 0.2, 0.5
class Net(nn.Module):
def __init__(self, num_inputs, num_outputs, num_hiddens1, num_hiddens2,
is_training = True):
super(Net, self).__init__()
self.num_inputs = num_inputs
self.training = is_training
self.lin1 = nn.Linear(num_inputs, num_hiddens1)
self.lin2 = nn.Linear(num_hiddens1, num_hiddens2)
self.lin3 = nn.Linear(num_hiddens2, num_outputs)
self.relu = nn.ReLU()
def forward(self, X):
H1 = self.relu(self.lin1(X.reshape((-1, self.num_inputs))))
# 只有在训练模型时才使用dropout
if self.training == True:
# 在第一个全连接层之后添加一个dropout层
H1 = dropout_layer(H1, dropout1)
H2 = self.relu(self.lin2(H1))
if self.training == True:
# 在第二个全连接层之后添加一个dropout层
H2 = dropout_layer(H2, dropout2)
out = self.lin3(H2)
return out
net = Net(num_inputs, num_outputs, num_hiddens1, num_hiddens2)
训练和测试
def accuracy(y_hat, y): #@save
"""计算预测正确的数量"""
if len(y_hat.shape) > 1 and y_hat.shape[1] > 1:
y_hat = y_hat.argmax(axis=1)
cmp = y_hat.type(y.dtype) == y
return float(cmp.type(y.dtype).sum())
class Accumulator: #@save
"""在n个变量上累加"""
def __init__(self, n):
self.data = [0.0] * n
def add(self, *args):
self.data = [a + float(b) for a, b in zip(self.data, args)]
def reset(self):
self.data = [0.0] * len(self.data)
def __getitem__(self, idx):
return self.data[idx]
def evaluate_accuracy(net, data_iter): #@save
"""计算在指定数据集上模型的精度"""
if isinstance(net, torch.nn.Module):
net.eval() # 将模型设置为评估模式
metric = Accumulator(2) # 正确预测数、预测总数
with torch.no_grad():
for X, y in data_iter:
metric.add(accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
def train_epoch_ch3(net, train_iter, loss, updater): #@save
# 将模型设置为训练模式
if isinstance(net, torch.nn.Module):
net.train()
# 训练损失总和、训练准确度总和、样本数
metric = Accumulator(3)
for X, y in train_iter:
# 计算梯度并更新参数
y_hat = net(X)
l = loss(y_hat, y)
if isinstance(updater, torch.optim.Optimizer):
# 使用PyTorch内置的优化器和损失函数
updater.zero_grad()
l.mean().backward()
updater.step()
else:
# 使用定制的优化器和损失函数
l.sum().backward()
updater(X.shape[0])
metric.add(float(l.sum()), accuracy(y_hat, y), y.numel())
# 返回训练损失和训练精度
return metric[0] / metric[2], metric[1] / metric[2]
class Animator: #@save
"""在动画中绘制数据"""
def __init__(self, xlabel=None, ylabel=None, legend=None, xlim=None,
ylim=None, xscale='linear', yscale='linear',
fmts=('-', 'm--', 'g-.', 'r:'), nrows=1, ncols=1,
figsize=(3.5, 2.5)):
# 增量地绘制多条线
if legend is None:
legend = []
d2l.use_svg_display()
self.fig, self.axes = d2l.plt.subplots(nrows, ncols, figsize=figsize)
if nrows * ncols == 1:
self.axes = [self.axes, ]
# 使用lambda函数捕获参数
self.config_axes = lambda: d2l.set_axes(
self.axes[0], xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
self.X, self.Y, self.fmts = None, None, fmts
def add(self, x, y):
# 向图表中添加多个数据点
if not hasattr(y, "__len__"):
y = [y]
n = len(y)
if not hasattr(x, "__len__"):
x = [x] * n
if not self.X:
self.X = [[] for _ in range(n)]
if not self.Y:
self.Y = [[] for _ in range(n)]
for i, (a, b) in enumerate(zip(x, y)):
if a is not None and b is not None:
self.X[i].append(a)
self.Y[i].append(b)
self.axes[0].cla()
for x, y, fmt in zip(self.X, self.Y, self.fmts):
self.axes[0].plot(x, y, fmt)
self.config_axes()
display.display(self.fig)
display.clear_output(wait=True)
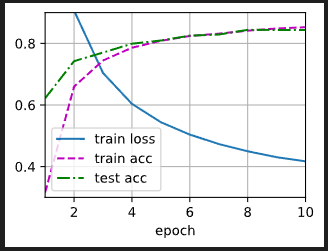
def train_ch3(net, train_iter, test_iter, loss, num_epochs, updater):
animator = Animator(xlabel='epoch', xlim=[1, num_epochs], ylim=[0.3, 0.9],
legend=['train loss', 'train acc', 'test acc'])
for epoch in range(num_epochs):
train_metrics = train_epoch_ch3(net, train_iter, loss, updater)
test_acc = evaluate_accuracy(net, test_iter)
animator.add(epoch + 1, train_metrics + (test_acc,))
train_loss, train_acc = train_metrics
assert train_loss < 0.5, train_loss
assert train_acc <= 1 and train_acc > 0.7, train_acc
assert test_acc <= 1 and test_acc > 0.7, test_acc
def updater(batch_size):
return d2l.sgd([W, b], lr, batch_size)
def predict_ch3(net, test_iter, n=6): #@save
for X, y in test_iter:
break
trues = d2l.get_fashion_mnist_labels(y)
preds = d2l.get_fashion_mnist_labels(net(X).argmax(axis=1))
titles = [true +'\n' + pred for true, pred in zip(trues, preds)]
d2l.show_images(
X[0:n].reshape((n, 28, 28)), 1, n, titles=titles[0:n])
num_epochs, lr, batch_size = 10, 0.5, 256
loss = nn.CrossEntropyLoss(reduction='none')
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
trainer = torch.optim.SGD(net.parameters(), lr=lr)
train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
简洁实现
对于深度学习框架的高级API,我们只需在每个全连接层之后添加一个Dropout层, 将暂退概率作为唯一的参数传递给它的构造函数。 在训练时,Dropout层将根据指定的暂退概率随机丢弃上一层的输出(相当于下一层的输入)。 在测试时,Dropout层仅传递数据。
net = nn.Sequential(nn.Flatten(),
nn.Linear(784, 256),
nn.ReLU(),
# 在第一个全连接层之后添加一个dropout层
nn.Dropout(dropout1),
nn.Linear(256, 256),
nn.ReLU(),
# 在第二个全连接层之后添加一个dropout层
nn.Dropout(dropout2),
nn.Linear(256, 10))
def init_weights(m):
if type(m) == nn.Linear:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights);
训练和测试
trainer = torch.optim.SGD(net.parameters(), lr=lr)
train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)